
Sistem robot dapat di definisikan sebagai unit-unit sistem terpisah (independent) yang saling berhubungan antara satu unit sistem dengan unit sistem yang lainnya sehingga secara terintegrasi dapat membentuk satu kesatuan sistem yang membangun robot.

Gambar 1. Diagram blok sistem robot
Bagian pokok suatu sistem robot adalah sistem mekanik (yang di dalamnya terdapat device input/sensor dan device output/aktuator) dan sistem pengendali (yang terdiri atas sistem elektronika & sistem kecerdasan robot). Untuk lebih memahami mengenai sistem robot, silakan melihat gambar 1 di atas.
Apabila diagram blok sistem robot pada gambar 1 di atas disederhanakan, maka akan berubah kurang-lebih seperti gambar 2. Bagian utama sebuah sistem (sistem apa pun itu!) pasti terdiri atas 1) Bagian masukan/input, 2) Bagian pemroses data masukan, dan 3) Bagian keluaran/output.

Gambar 2. Diagram blok sistem
Dalam sistem robot, bagian input adalah berupa komponen sensor, yaitu pendeteksi (detektor) kondisi lingkungan dalam diri robot (lingkungan internal) maupun kondisi lingkungan di luar diri robot (lingkungan eksternal). Bagian pemroses data input, pada umumnya adalah berupa komponen atau peranti berbasis logika, seperti IC gerbang logika (peranti tidak terprogram), IC mikrokontroler, programmable logic controller (PLC), field programmable gate array (FPGA), dan lain sebagainya. Untuk mikrokontroler, PLC, dan FPGA merupakan termasuk peranti pemroses data yang terprogram (dapat diprogram/diatur ulang). Selanjutnya, bagian output adalah berupa komponen elektro-mekanik yang memiliki peran penting dalam menggerakkan bagian-bagian mekanik robot. Komponen ini lebih dikenal dengan sebutan aktuator. Komponen elektro-mekanik yang sering digunakan sebagai aktuator robot adalah seperti motor DC magnet-permanent (DCMP), motor DC stepper (DC-STP), motor DC servo (DC-SRV), hidrolik, dan pneumatik.
Pembangunan Sistem Robot
Proyek membangun robot adalah proyek yang interdisipliner, artinya untuk membangun sebuah robot (apalagi robot yang cerdas dan canggih) tidak bisa hanya dikerjakan oleh satu orang dengan satu keahlian ilmu tertentu. Karena bagian-bagian sistem robot itu lebih dari satu (bahkan banyak), dimana bagian-bagian tersebut hanya bisa ditangani oleh orang yang memiliki kemampuan di dibidangnya. Misalnya bagian mekanik, membangun bagian mekanik robot sudah barang tentu harus dikerjakan oleh mereka yang menguasai ilmu mekanik, yaitu mereka yang dari disiplin ilmu mesin dan mekatronik. Kerja bagian mekanik meliputi desain fisik robot, uji/simulasi mekanik robot, analisis pergerakan (kinematis & dinamis) mekanik robot, dan kerja mekanis lainnya. Kemudian bagian elektronik, membangun bagian elektronik robot tentunya juga harus dikerjakan oleh mereka yang menguasai ilmu elektronika, yaitu mereka yang dari disiplin ilmu elektronika, fisika, dan mekatronik. Kerja bagian elektronik meliputi desain sistem elektronik pengendali robot, simulasi sistem elektronik robot, pembuatan papan sistem elektronik (PCB), perakitan komponen, uji dan analisis kinerja sistem elektronika robot, dan kerja elektronis lainnya. Selanjutnya bagian kecerdasan robot, yang dapat menangani tentang kecerdasan kerja robot tentunya adalah mereka yang menguasai ilmu kecerdasan buatan untuk robot, yaitu mereka yang dari disiplin ilmu komputer, informatika, fisika, dan elektronika instrumentasi.
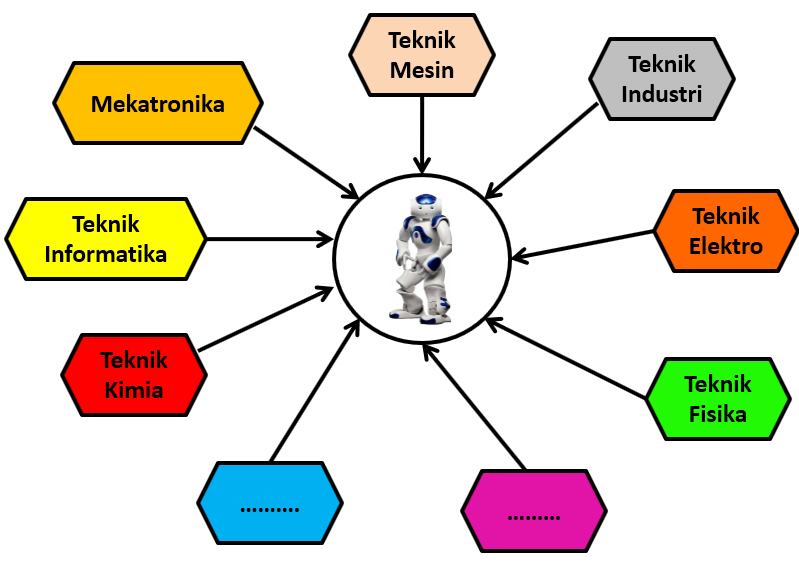
Gambar 3. Tim pembangun robot
Gambar 3 merupakan diagram yang mengilustrasikan mengenai sebuah tim kerja pembangunan suatu robot yang melibatkan personal-personal dengan disiplin ilmu yang sangat beragam.
Sumber :http://www.robotics-university.com




Tidak ada komentar:
Posting Komentar